Ciencia
Crean un guante inspirado en los pulpos para coger objetos submarinos
Utiltza sensores para activar las diferentes ventosas que imitan las del animal
Crean un guante inspirado en los pulpos para coger objetos submarinos
Los seres humanos no estamos preparados para vivir en un entorno subacuático: necesitamos bombonas para respirar, trajes de neopreno para protegernos y calentarnos y gafas para ver con claridad. Y en este entorno, nuestras manos no son una excepción.
Para los equipos de rescate, arqueólogos marinos, ingenieros de puentes y grupos de salvamento, que usan las manos para extraer objetos y personas del agua, esta limitación llega a ser un inconveniente. Lo ideal sería tener unas manos hechas para el agua.
Y eso es lo que ha diseñado un equipo de investigadores dirigido por Michael Bartlett, de la Universidad Tecnológica de Virginia (EE.UU.), un guante inspirado en los pulpos capaz de sujetar objetos de forma segura bajo el agua.
La investigación es portada este miércoles de la revista Science Advances.
«La naturaleza tiene algunas soluciones estupendas, así que nuestro equipo buscó ideas en el mundo natural. Y el pulpo se convirtió nuestra inspiración», comenta Bartlett, experto en robótica blanda y soluciones biológicas.
El pulpo es una de las criaturas más singulares del planeta, dotada de ocho largos brazos que pueden agarrar infinidad de cosas en el agua gracias a unas ventosas controladas por los músculos y los nervios del animal.
Cada ventosa, con forma de émbolo, cuenta con una poderosa capacidad de agarre y, cuando el borde exterior de la ventosa sella un objeto, los músculos se contraen y relajan el área ahuecada para dar y liberar presión.
Cuando son varias las ventosas que enganchan un objeto, resulta imposible escapar de esa presión adhesiva.
Además, «el pulpo controla más de 2.000 ventosas en sus ocho brazos y procesa información de diversos sensores químicos y mecánicos. El pulpo reúne realmente la capacidad de sintonización de la adhesión, la detección y el control para manipular objetos subacuáticos», destaca Bartlett.
Para diseñar el guante, los investigadores reimaginaron las ventosas del pulpo: trozos de goma flexibles cubiertos por membranas blandas y accionadas.
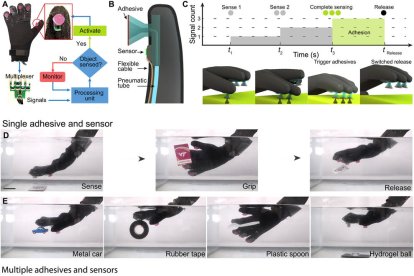
Una vez desarrollados los mecanismos de adhesión, necesitaban que el guante detectara los objetos y activara la adhesión, para lo cual usaron unos sensores ópticos de proximidad denominados micro-Lidar.
El uso de los sensores para activar las ventosas también hace que el sistema se adapte al entorno natural, igual que hace un pulpo cuando enrolla sus brazos en los riscos de las rocas y las superficies, y se adhiere a conchas lisas y percebes rugosos.
El equipo también quería algo que resultara natural para los humanos y les permitiera agarrar objetos sin esfuerzo, adaptándose a diferentes formas y tamaños, como haría un pulpo.
La solución fue un guante con ventosas sintéticas y sensores estrechamente integrados, una armonía de sistemas vestibles que atrapan muchas formas diferentes bajo el agua y al que han llamado «Octa-glove» (algo así como el pulpo-guante).
«Al fusionar materiales adhesivos suaves y con capacidad de respuesta con la electrónica incorporada, podemos agarrar objetos sin tener que apretar. Esto hace que la manipulación de objetos húmedos o bajo el agua sea mucho más fácil y natural», apunta Bartlett.
En las pruebas, los investigadores probaron diferentes modos de agarre en objetos planos, de metal, cilindros, y una pelota de hidrogel ultrasuave.
Al reconfigurar la red de sensores para utilizar todos los sensores para la detección de objetos, también fueron capaces de agarrar objetos más grandes, como un plato, una caja y un bol.
Se adhirieron y levantaron objetos planos, cilíndricos, convexos y esféricos, tanto de materiales duros como blandos, incluso cuando los usuarios no agarraron el objeto cerrando las manos.
Los investigadores creen que este guante de robótica blanda para el agarre bajo el agua podrá usarse en aplicaciones de tecnologías asistidas por el usuario y en el cuidado de la salud, así como en la fabricación para ensamblar y manipular objetos húmedos.